-
A Physical Interface For Digital Sculpting

In completing my masters thesis at ITP, I asked myself the question, “What should computing feel like?” Today, most design work is conducted using computerized tools. There are, of course, significant conveniences gained by forgoing traditional physical media, but in the transition we have severed the special connection a designer shares with their materials. Many artists and designers choose to augment their computing experiences by using tools like digital graphics tablets, but the sensation is not far removed from working with a mouse. These solutions are effective in a two dimensional workspace, but once a third dimension is involved, the tools at hand become inadequate. My project attempts to remedy those inadequacies by simulating the haptic sensations of manipulating a block of clay in the context of a 3D modeling environment. »
-
A Robot's First Twitches
I’m building a self-balancing robot, because that seemed like a nice casual side project during my thesis. Surprisingly, it kinda works a little bit. Pretty much everything here needs to be redone in some form: the Arduino needs to sit differently in order to fit power and the USB input (for some reason I can’t run this code without a USB connection, although I can’t actually figure out why), the chassis needs to be larger, the standoffs need a better fastening system (next version probably won’t use standoffs anyway), I need motors with encoder wheels and possibly a lower gear ratio, and I should consider using a different motor shield, although this one seems manageable. But it does actually work at this point! It needs a lot of TLC to get that forward and backward motion working (and also some kind of control scheme), but it’s staying upright and self-correcting it’s position, which in this case totally counts as a minimum viable product. Not bad for a one-week build (not to mention my first ever robot). »
-
Expanding Ring
The assignment this week was a wheel that did “more than just roll and spin,” so I set out to build ring-shaped mechanism that would expand and contract while remaining circular. I based my design on some of Chuck Hoberman’s patent drawings for expandable structures, which, coincidentally, were responsible for some of my favorite childhood toys. »
-
Flywheel Away Home
This week for Reinventing the Wheel I attempted to make a flywheel. It didn’t really go great. Initially, I wanted to try machining a brass wheel a la Clickspring, but I kinda chickened out. I can probably turn a reasonable facsimile of his design without using a super glue arbor (no open flames allowed at ITP, so breaking that bond will be tricky), but turning a well-balanced wheel without any sort of dial indicator seemed impossible, so I backed away from that idea. Instead I decided to try following this design to make a walking gyroscope robot. »
-
Experiments With Grasshopper

In preparation for my thesis I’ve been diving into learning the Grasshopper extension for Rhino and experiment in creating generative geometries. These are a few of the practice pieces that I’ve been creating. »
-
Cricket Wheels

I’ve taken up a part-time position in Santa’s workshop (it’s actual more of a spring internship; I’m hoping for an official offer before they start gearing up for the Christmas push mid-summer). I got started by protoypting a pull-toy cricket. »
-
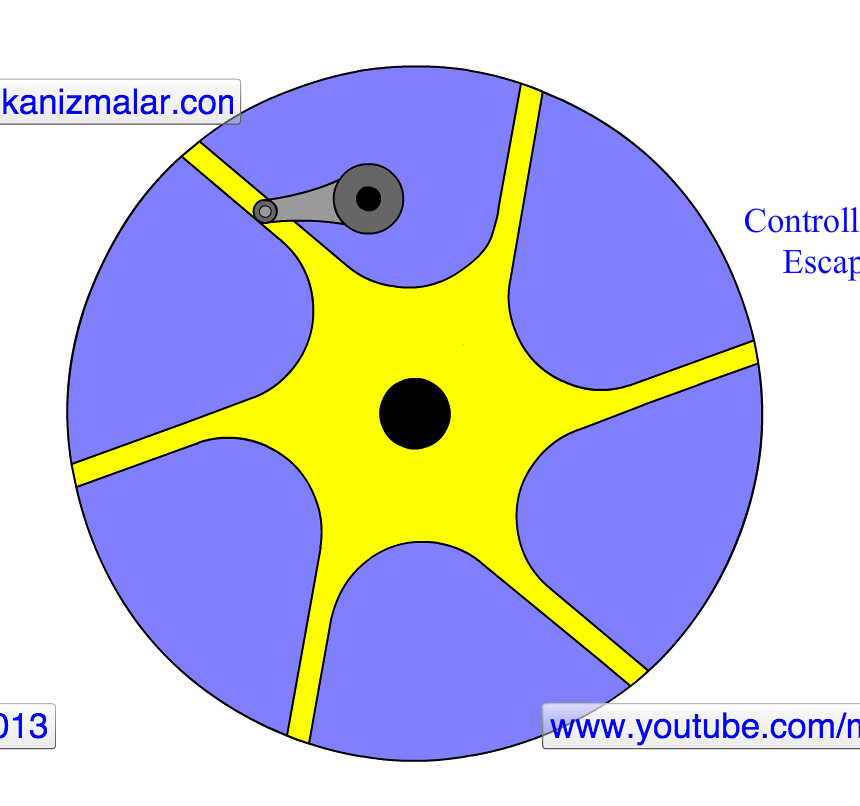
CTRL-ALT-ESCapement
I’ve been working on fabricating a wheeled mechanism for Reinventing the Wheel, and it’s been… an adventure. I’ve been trying to make an escapement mechanism, but I haven’t been able to find a proper name for this thing; the initial references that I’ve seen called it a controlled output escapement, but I can’t find any other mentions of this sort of machine. Either way, this is my reference inspiration An escapement uses a continuously rotating driver to actuate a follower at consistent intervals, in this case 90º at a time. »
-
Experimenting With Bluetooth LE
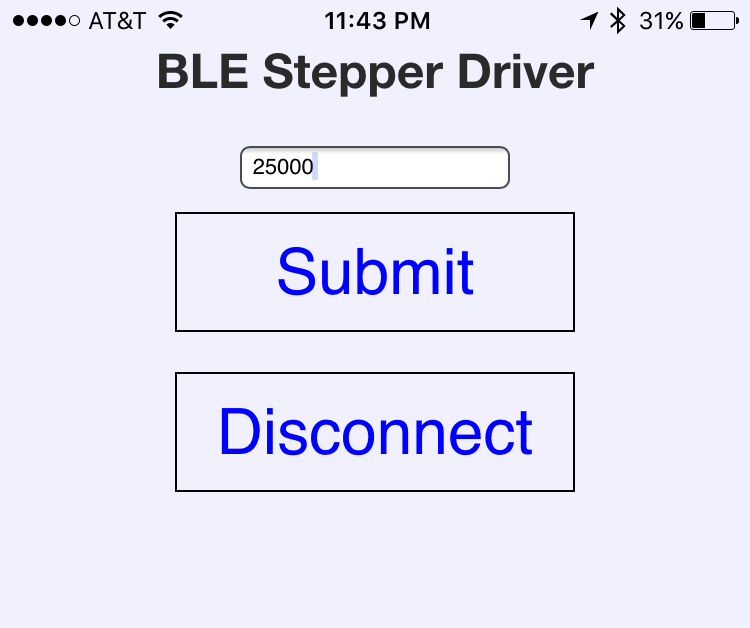
I took a short course earlier this semester on using Bluetooth Low Energy to control devices, including lights, temperature and motion sensors, as well as wearable and portable devices. For my “final” I built a simple app to connect with and control a stepper motor. »
{kind=link}